@micahmosier65 wrote:
1) Latest image with Raspberry Pi 3 and Navio 2 board.
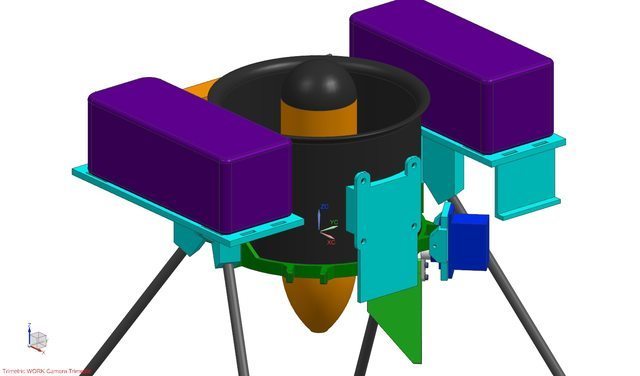
2) I need to use singlecopter in an X frame configuration and by default all that is available is the + frame configuration. I have the modified ap motors single file to allow for an X frame configuration I just cannot get the code onto the raspberry pi to compile. I have tried using a thumb drive and ssh file transfer but no dice. How can I accomplish this? I have included a picture of our build to illustrate why we need the X config. The Navio 2 will fit on the front blue plate.
Posts: 4
Participants: 2
















